Overview
A core philosophy driving Artificial Life (ALife) is to study not only "life as we know it" but also "life as it could be". Because ALife primarily studies life through computational simulations, this approach necessarily means searching through and mapping out an entire space of possible simulations rather than investigating any single simulation. By doing so, researchers can study why and how different simulation configurations give rise to distinct emergent behaviors.
Methods
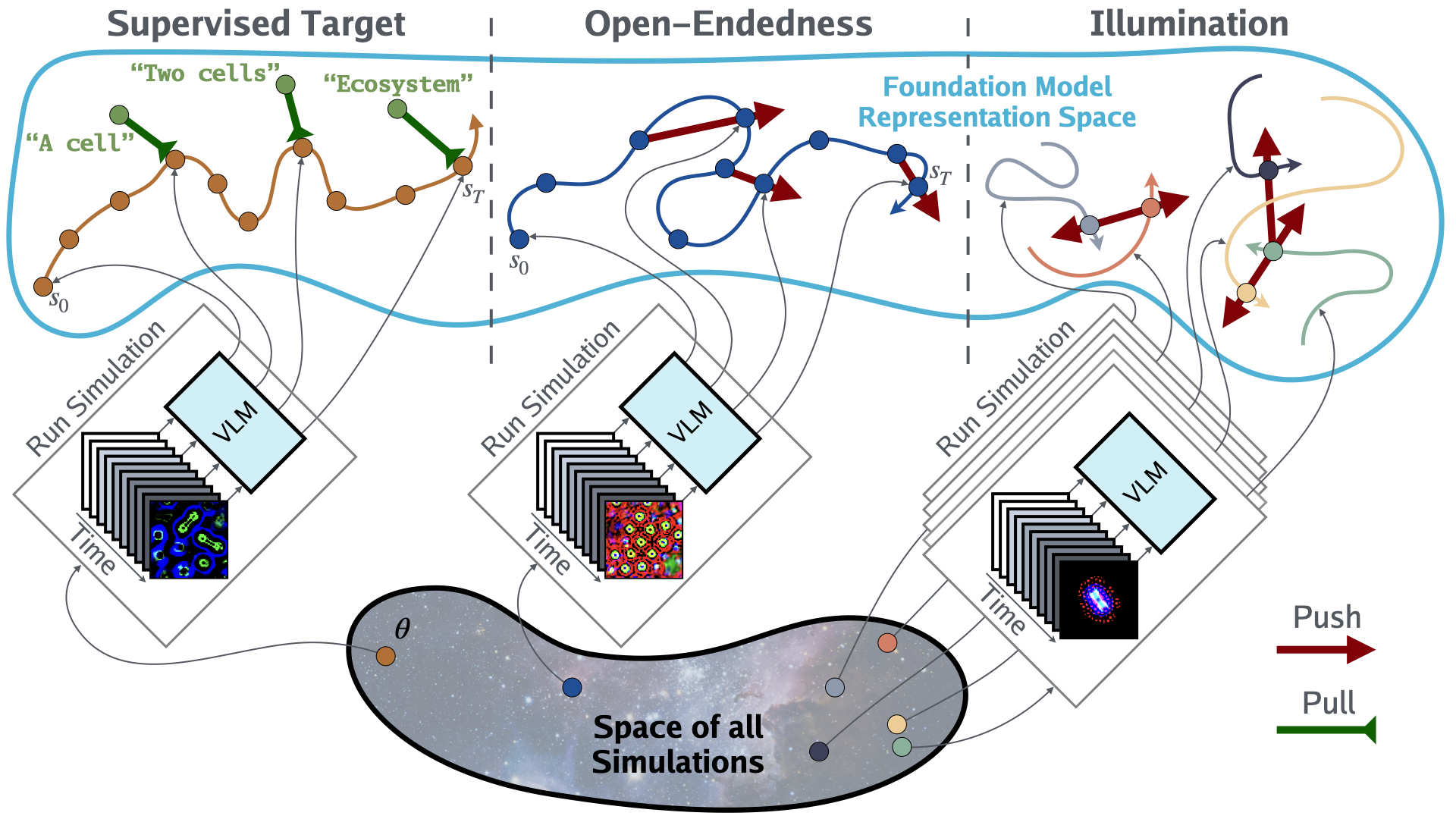
Our proposed framework, ASAL, uses vision-language foundation models to discover ALife simulations by formulating the processes as three search problems:
Supervised Target
To find target simulations, ASAL searches for a simulation which produces a trajectory in the foundation model space that aligns with a given sequence of prompts.
Open-Endedness
To find open-ended simulations, ASAL searches for a simulation which produces a trajectory that has high historical novelty during each timestep.
Illumination
To illuminate the set of simulations, ASAL searches for a set of diverse simulations which are far from their nearest neighbor.
Experiments
Searching for Target Simulations
Using the supervised target equation, ASAL discovered simulations that result in a final state which matches the specified prompt. Results are shown for three different substrates.
Temporal Targets
Using the supervised target equation, ASAL discovered simulations that produce a sequence of events which match a list of prompts. The second row shows how the first simulation generalizes to a different initial state.
Searching for Open-Ended Simulations
Using the open-endedness equation, ASAL discovered open-ended simulations in the Life-Like CAs substrate. Simulations are labeled in Golly notation to denote the number of living neighbors required for birth and survival.
Simulation Atlas
ASAL discovered a large set of diverse simulations by using the illumination algorithm on the Lenia substrate. The resulting final states of these simulations are then embedded using CLIP and projected into 2-D with UMAP.
This simulation atlas maps all discovered simulations in an organized manner. The top left insets show randomly sampled simulations without illumination.
Quantifying ALife
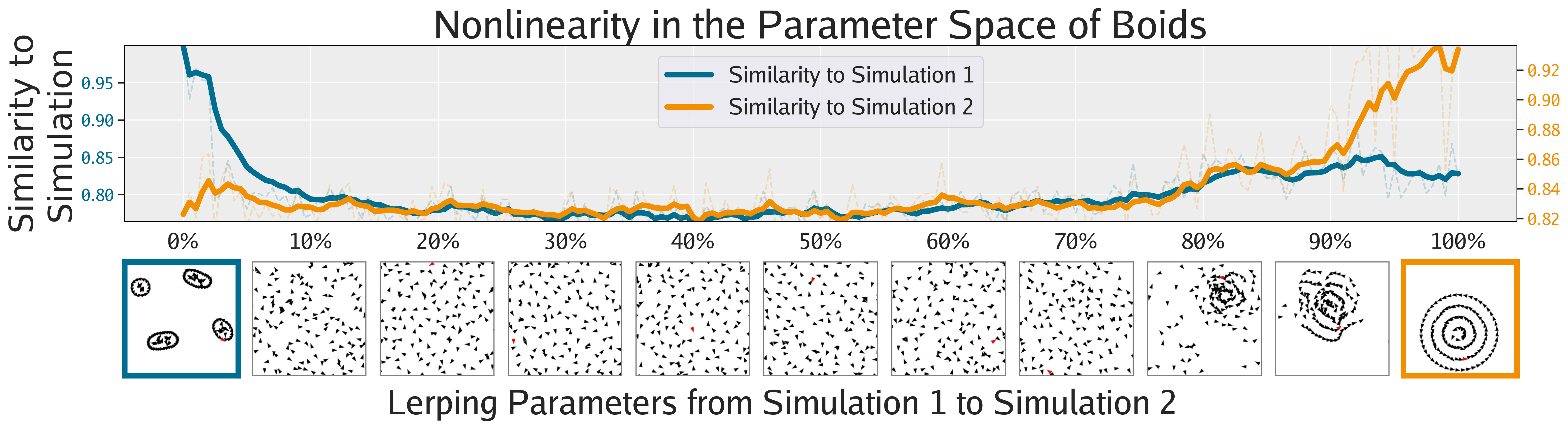
The simulation final state as simulation parameters are linearly interpolated from one simulation to another.
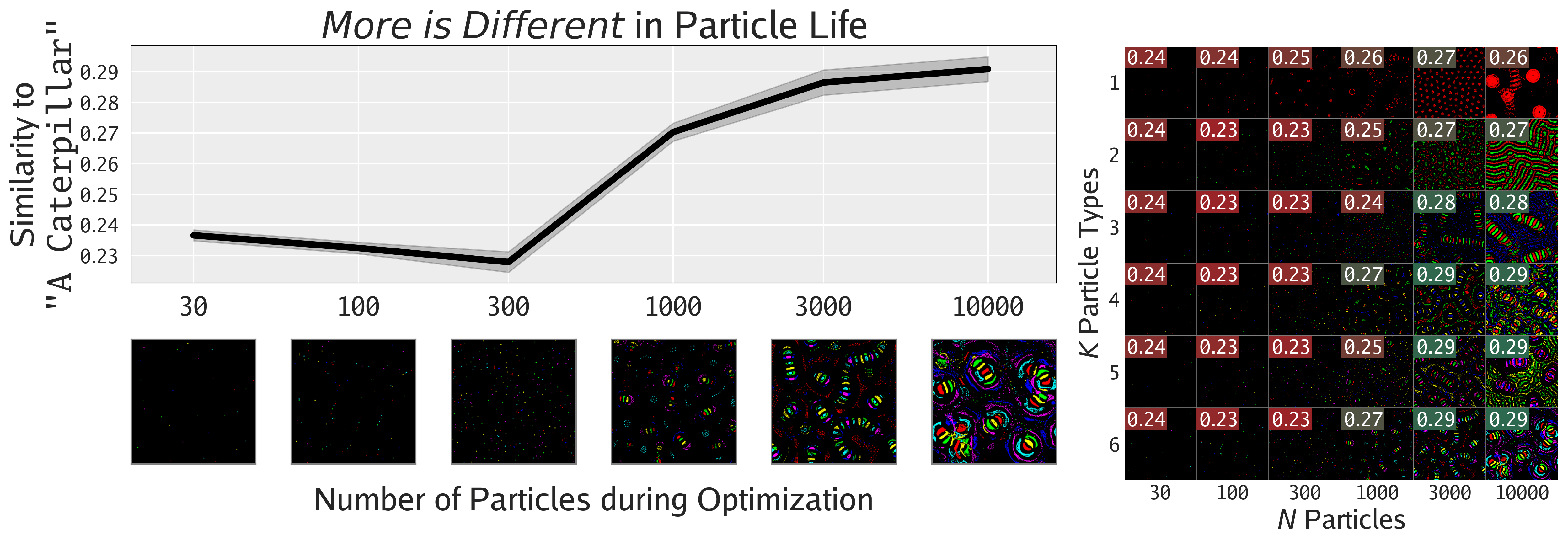
Plotting the emergence of "a caterpillar" in Particle Life as the number of particles is increased.
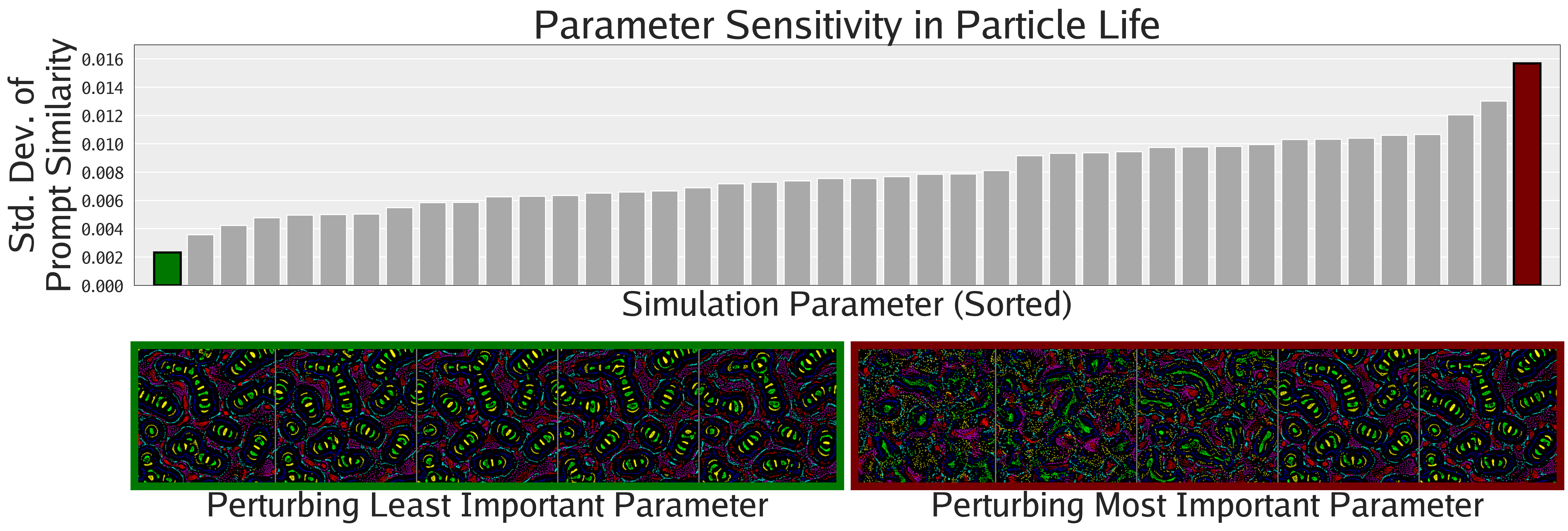
Ranking a Particle Life simulation's parameters by importance to the simulation behavior.
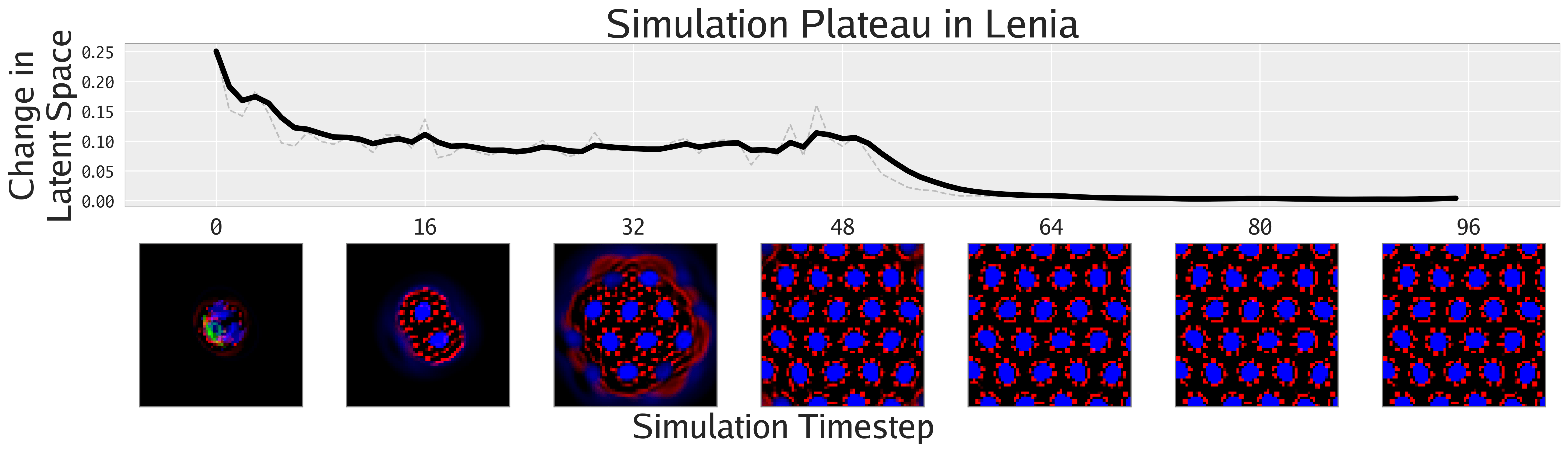
Plotting the change of the CLIP embedding over simulation time quantifies the plateau signal in Lenia.
Foundation Model Comparison
The FM is ablated in the illumination experiments. CLIP seems to be slightly better than DINOv2 in creating human-aligned diversity, but both are significantly better than pixel based representations.